PLIM: Programmable Logic In the Middle
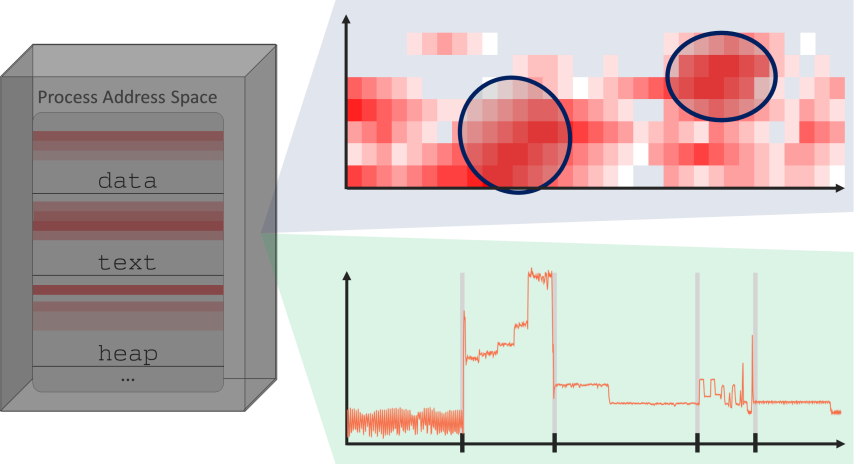
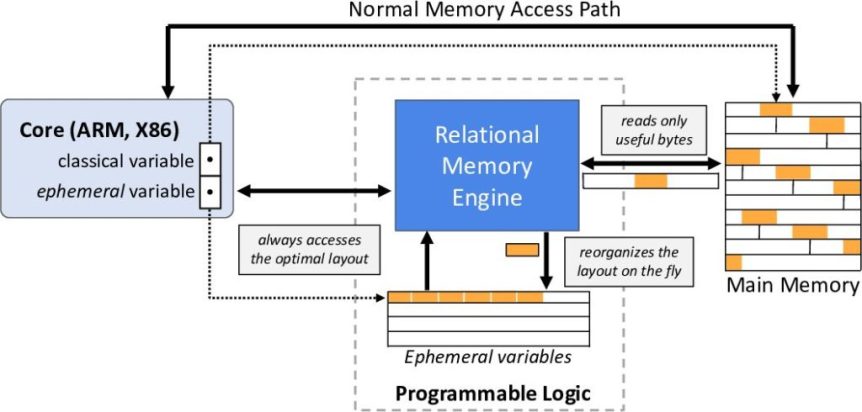
Strong from the observation that unpredictability arises from a lack of fine-grained control over the behavior of shared hardware components, we outline a promising new resource management approach. We demonstrate that it is possible to introduce Programmable Logic In-the-Middle (PLIM) between a traditional multi-core processor and main memory. This provides the unique capability of manipulating individual memory transactions. Perfect Translator ...